Collider collision detection
Collision detection is performed for the set collider list.
For details on settings, see Collision detection settings.
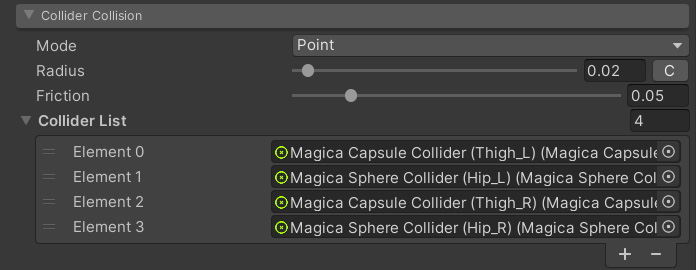
| Mode |
Select the method of collision detection with the collider. [Point] [Edge] |
| Radius | The radius of the vertex sphere. In edge mode, it is the radius of the edge. |
| Friction | High friction prevents vertices from sliding over colliders. |
| Collider List | List of colliders. Colliders that perform collision detection must be registered in this list. |
Vertex sphere mode
Treat the vertices of the proxy mesh as spheres and perform collision detection with colliders.
There is an advantage that you can use it without worrying about it because the processing load is light.
However, if the collider is small as shown below, there is a problem that it will pass through between the spheres, so be careful.
Edge mode
This mode performs collision detection between proxy mesh edges and colliders.
Edge mode has the great advantage of not having the slip-through problem of sphere mode.
However, it should be used with caution as the processing load is higher than the sphere mode.
You should only consider using it if you have problems with vertex sphere mode.
Behavior in BoneSpring
Collision detection works in a slightly special way only when using BoneSpring.
The contents of the parameters will also change as shown below.
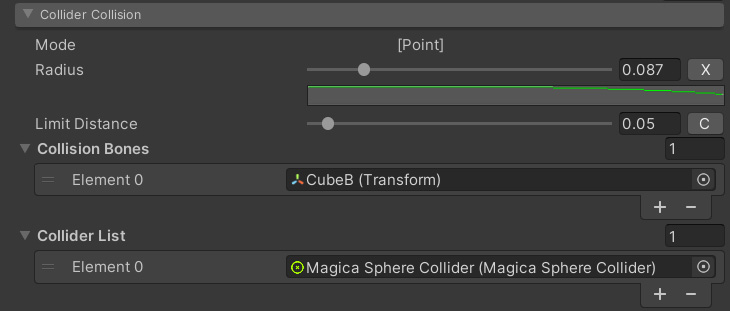
First of all, in BoneSpring, the collision mode is fixed to Point.
The Transform you want to perform collision detection must be registered separately in CollisionBones.
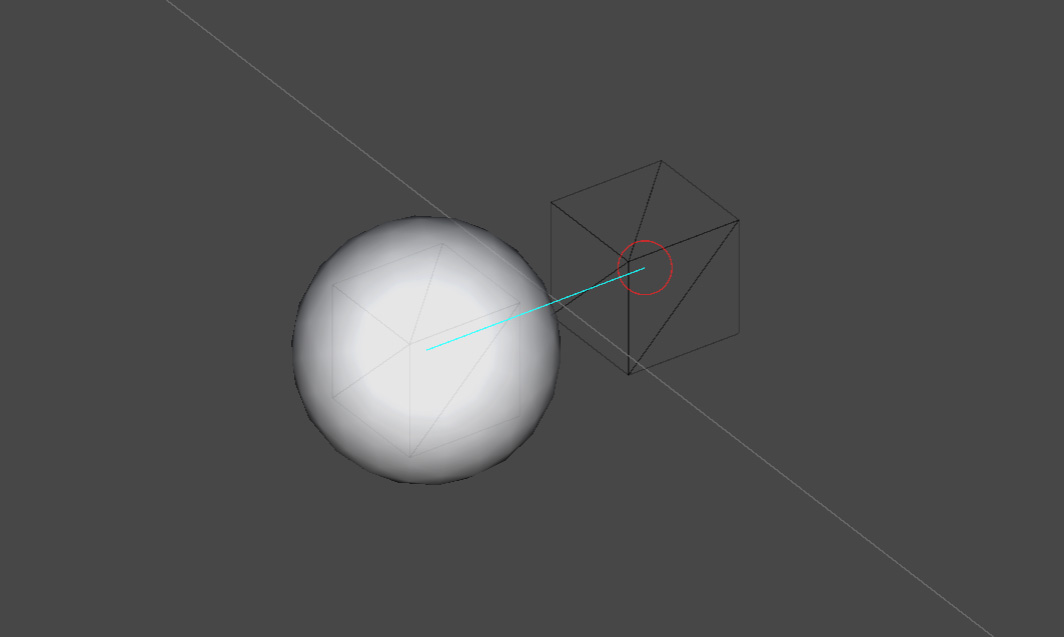
Only Transforms registered in CollisiontBones are displayed as filled spheres as shown below and can be subjected to collision detection.
Also, in BoneSpring, the distance that vertices can move is limited by collision detection.
This is the distance from the origin and is set by the [LimitDistance] parameter.
Finally, in BoneSpring, the repulsive force with the collider becomes weaker depending on the distance from the origin.
This is a restriction to prevent vertices from being pushed too far away from the origin.